
|
Кількість
|
Вартість
|
||
|
|
|||
|
|
|||
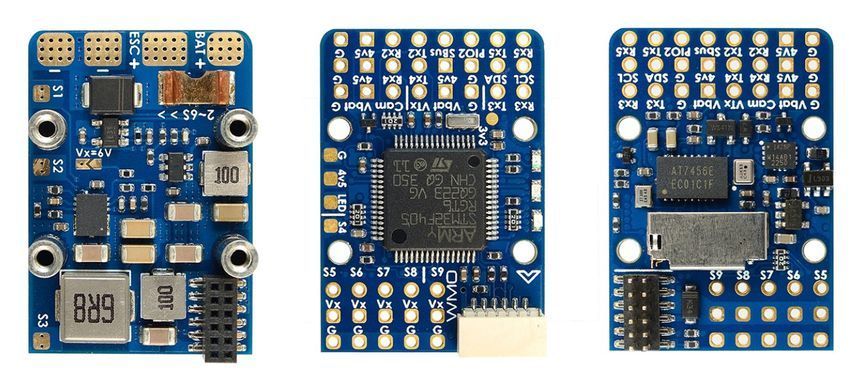
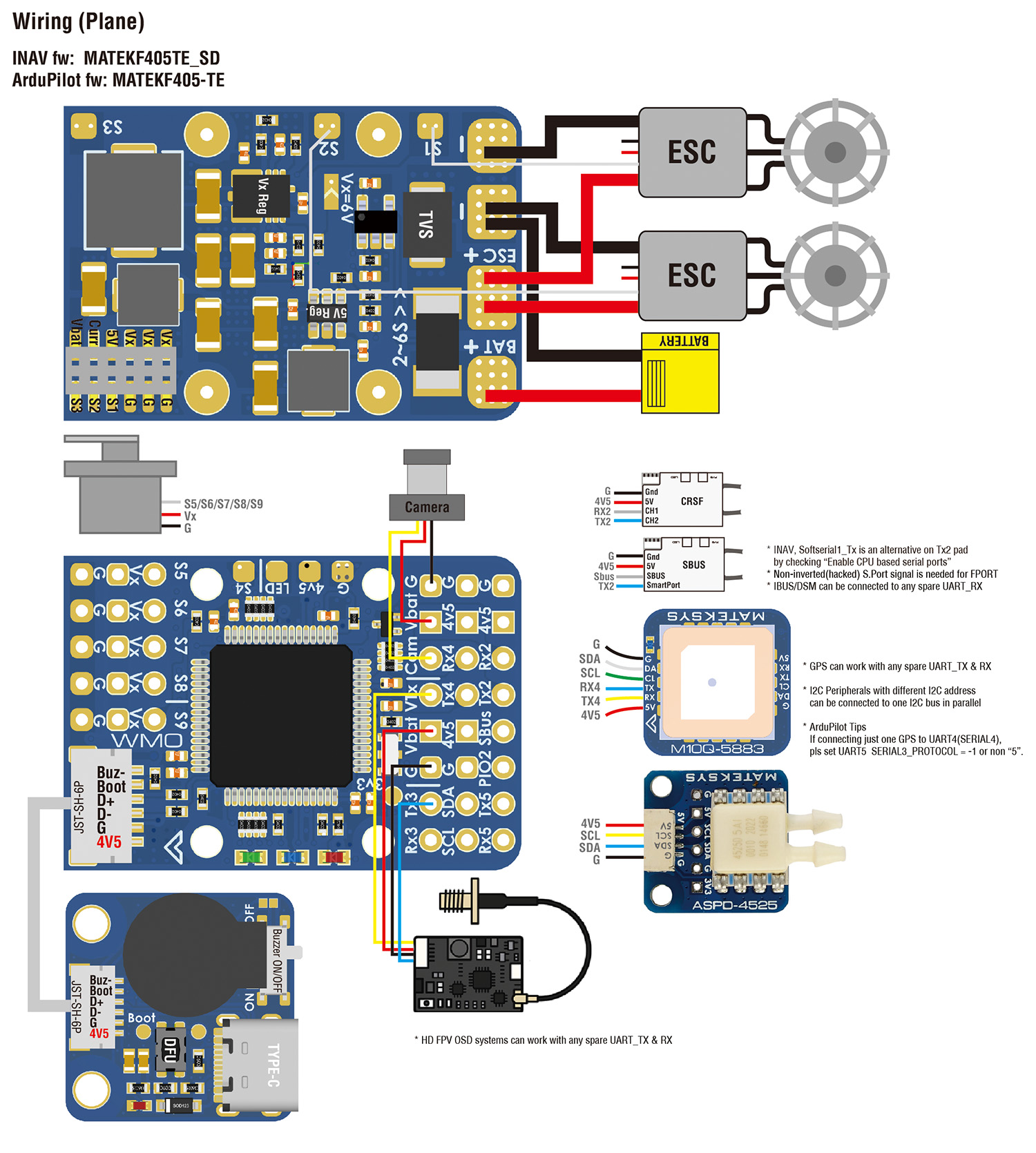
Контролер польоту F405-WMO
STM32F405RGT6, ICM42688P, SPL06, OSD, SD слор, 4xUARTs, 9x ШІМ, 1xI2C, 2xADC
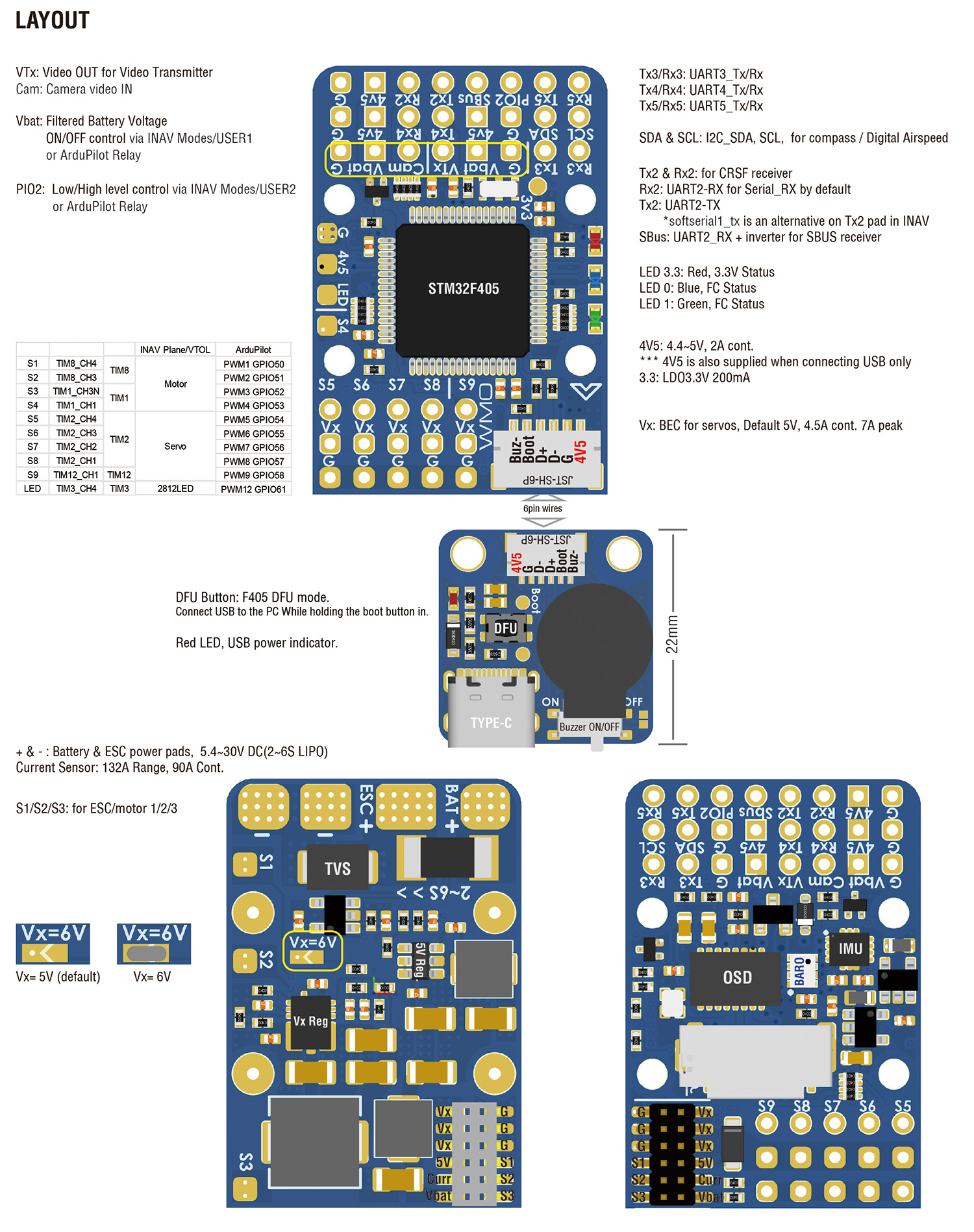
ArduPilot ШІМ 5V толерантний ввід/вивід S1 PWM1 GPIO50 TIM8_CH4 DMA/DShot Група1 S2 PWM2 GPIO51 TIM8_CH3 DMA/DShot S3 PWM3 GPIO52 ТИМ1_Ч3Н DMA/DShot Група2 S4 PWM4 GPIO53 TIM1_CH1 DMA/DShot S5 PWM5 GPIO54 TIM2_CH4 DMA/DShot Гурп3 S6 PWM6 GPIO55 TIM2_CH3 DMA/DShot S7 PWM7 GPIO56 TIM2_CH2 DMA/DShot S8 PWM8 GPIO57 TIM2_CH1 DMA/DShot S9 PWM9 GPIO58 TIM12_CH1 БЕЗ DMA Гурп4 Світлодіодна накладка PWM12 GPIO61 TIM3_CH4 DMA/DShot Гурп5 SERVO12_FUNCTION 120, NTF_LED_TYPES neopixel Змішування Dshot і нормальної роботи ШІМ для виходів обмежено групами, тобто увімкнення Dshot для виходу в групі вимагає, щоб УСІ виходи в цій групі були налаштовані та використані як Dshot, а не як виходи ШІМ. Якщо сервопривод і двигун змішані в одній групі, переконайтеся, що ця група працює з найнижчою частотою ШІМ відповідно до специфікації сервопривод тобто. Серво підтримує Макс. 50Hz, ESC повинен працювати на частоті 50Hz в цій групі. АЦП Датчик ВБАТ 0~30В Вбудований роздільник 1K:20K BATT_VOLT_PIN BATT_VOLT_MULT 14 21.0 Датчик струму 0~3, 3В вбудований поточний сенс BATT_CURR_PIN BATT_AMP_PERVLT 15 40 I2C I2C1 5V толерантний ввід/вивід Компас COMPASS_AUTODEC 1 бортовий Baro SPL06-001 Адреса 0x76 Цифрова швидкість I2C MS4525 ДЛВР-Л10Д ARSPD_BUS ARSPD_TYPE ARSPD_TYPE 1 1 9 УАРТ 5V толерантний ввід/вивід USB USB консоль СЕРІЯ0 TX3 RX3 USART3 БЕЗ DMA телем2 СЕРІЙНИЙ2 TX5 RX5 УАРТ5 БЕЗ DMA GPS1 *** СЕРІЙНИЙ3 TX4 RX4 УАРТ4 БЕЗ DMA GPS2 *** СЕРІЙНИЙ4 TX2 RX2 СБУС USART2 з ДМА RC введення/приймач СЕРІЙНИЙ6 RX2 IBUS/DSM/PPM BRD_ALT_CONFIG 0 За замовчуванням Sbus колодка СБУС TX2 і RX2 CRSF BRD_ALT_CONFIG 1 SERIAL6_PROTOCOL 23 SERIAL6_OPTIONS 0 TX2 неперевернутий FPort (зламаний) SERIAL6_ОПЦІЇ 4 TX2 SRXL2 SERIAL6_ОПЦІЇ 4 *** Якщо підключити лише один GPS до UART4 (TX4/RX4), pls set SERIAL3_PROTOCOL = -1 або non “5”. інакше ArduPilot припинить пошук GPS під час завантаження, якщо його не буде знайдено на першому порту (SERIAL3/UART5), налаштованому для протоколу GPS. Реєстрація SD-карти встановити LOG_BACKEND_TYPE = 1 (Файл) Телеметрія Frsky Smartport неінвертований (зламаний) ортовий сигнал будь-який запасний Uart_TX SERIALx_BAUD 57 SERIALx_ОПЦІЇ 7 SERIALx_PROTOCOL 4 або 10(для yaapu) Реле (ПІНІО) PINIO1, вихід Vbat ON/OFF, ON за замовчуванням PINIO2, PIO2 pad вихід Низький/Високий рівень, Низький рівень за замовчуванням # GPIO PA4 PINIO1 ВИХІД GPIO(81) НИЗЬКИЙ PB5 PINIO2 ВИХІД GPIO(82) НИЗЬКИЙ # RCx_OPTION: параметр введення RC 28 Relay1 Увімкнення/Вимкнення 34 Relay2 Увімкнення/Вимкнення наприклад. RELAY1_FUNCTION 1 RELAY1_PIN 81 RC7_OPTION 28//Використовуйте CH7 передавача для керування виходом Vbat ON/OFF RELAY2_FUNCTION 1 RELAY_PIN2 82//PIO2 колодка RC8_OPTION 34//Використовуйте CH8 передавача для керування PIO2 Низький/Високий рівень Налаштована функція буде активована, коли значення pwm допоміжного перемикача стане вищим за 1800. Він буде деактивований, коли значення впаде нижче 1200. Перевірте значення pwm, надіслане з передавача, коли комутатор високий і низький, використовуючи початкове налаштування планувальника місії >> Обов’язкове обладнання >> Екран калібрування радіозв’язку. Якщо він не піднімається вище 1800 або нижче 1200, найкраще відрегулювати кінцеві точки сервоприводу в передавачі.
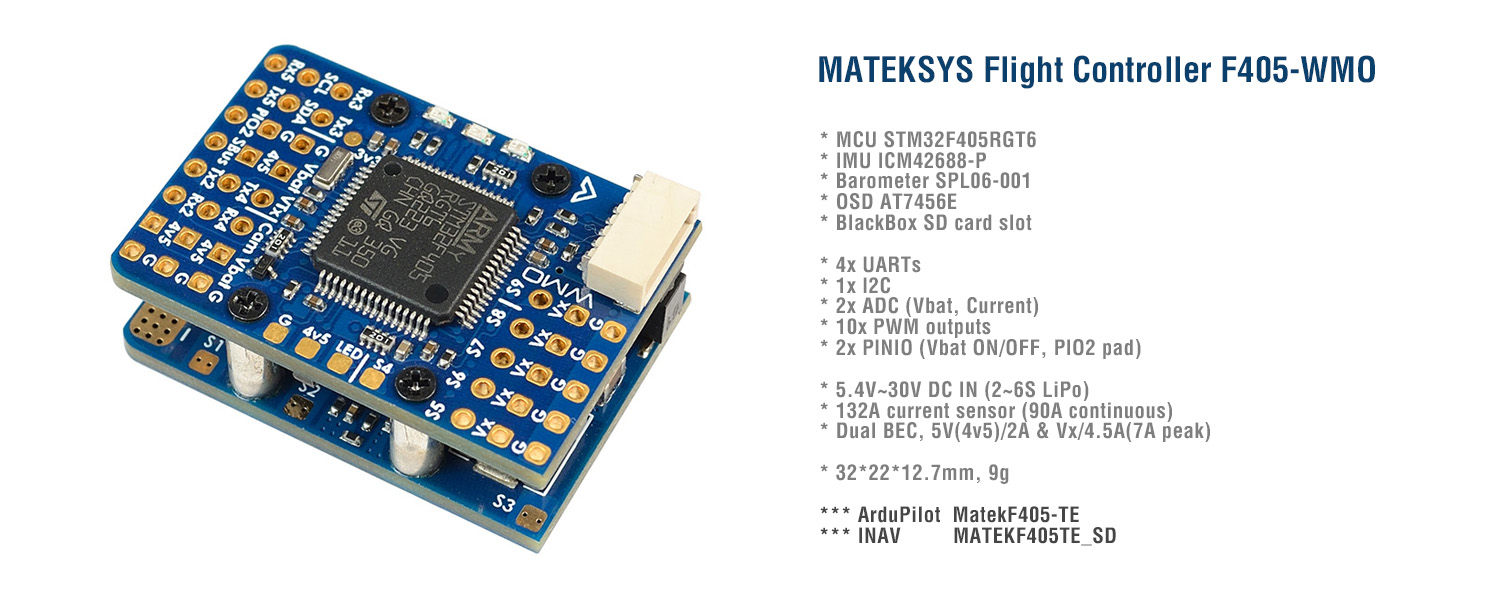
Специфікації FC
- MCU: СТМ32Ф405РГТ6, 168МГц, 1МБ Флеш
- ІМУ: МЦМ42688-П
- Баро: SPL06-001
- OSD: AT7456E
- Blackbox: слот для SD-карт
- 4х УАРТ
- 10x виходи ШІМ
- 1x I2C
- 2x АЦП (VBAT, Струм)
- 1x запасний PINIO
- Контроль ВБТ-виходу ON/OFF
- USB/подовжувач звукового сигналу з типом C (USB2.0)
- Вбудований інвертор на UART2-RX для входу SBUS
Сила
- 5.4~30V DC IN (2~6S LiPo)
- 132A Current Sense (шкала INAV 250, ArduPilot 40A/V)
- PDB/Резистор вимірювання струму: 90A безперервний, 132A пакет.
- BEC 5V(4v5) 2A для FC & Периферійні пристрої
- BEC Vx 4.5A conПік 7А) для сервоприводів, опція 5В/6В
- Фільтрований Vbat для VTX і камери
- ЛДО 3.3В 200м А
- Датчик напруги батареї: 1к:20к
Прошивка ФК
- ArduPilot: MatekF405-TE
- ИНАВ: МАТЕКФ405ТЕ_СД
Фізичний
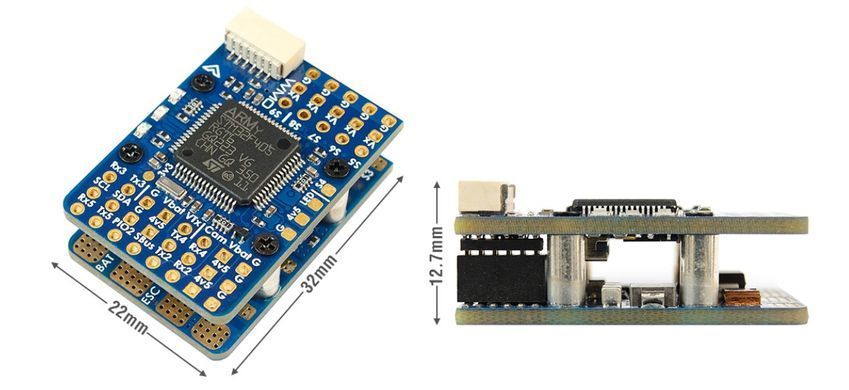
- Розміри: 32 x 22 x 12, 7 мм
- Вага: 9g
Включаючи
- 1x F405-ВМО
- 1x USB (Type-C)/Beep (пасивний зумер) Подовжувач + 20см JST-SH-6P кабель для USB-подовжувача.
- Дюпон 2.54 шпильки (Дошка відправляється розпаяною)
| ІНАВ | ТИМ | INAV Plane/VTOL | |||
| ШІМ | S1 | 5 В толерантний ввід/вивід | TIM8_CH4 | ТИМ8 | Мотор |
| S2 | 5 В толерантний ввід/вивід | TIM8_CH3 | |||
| S3 | 5 В толерантний ввід/вивід | ТИМ1_Ч3Н | ТИМ1 | ||
| S4 | 5 В толерантний ввід/вивід | TIM1_CH1 | |||
| S5 | 5 В толерантний ввід/вивід | TIM2_CH4 | ТИМ2 | Серво | |
| S6 | 5 В толерантний ввід/вивід | TIM2_CH3 | |||
| S7 | 5 В толерантний ввід/вивід | TIM2_CH2 | |||
| S8 | 5 В толерантний ввід/вивід | TIM2_CH1 | |||
| S9 | 5 В толерантний ввід/вивід | TIM12_CH1 | ТИМ12 | ||
| СВІТЛОДІОДНИЙ | 5 В толерантний ввід/вивід | TIM3_CH4 | ТИМ3 | 2812LED | |
| АЦП | Напруга VBAT | 5, 4~30В | ADC_CHANNEL_1 | шкала напруги 2100 | |
| Поточна | 0~3, 3В | ADC_CHANNEL_2 | поточна шкала 250 | ||
| I2C | SCL SDA |
5V толерантний ввід/вивід | Компас | ||
| ОЛЕД | |||||
| бортовий барометр | |||||
| Цифровий датчик швидкості повітря | |||||
| Датчик температури | |||||
| УАРТ | USB | 5V толерантний ввід/вивід | USB | ||
| TX3 RX3 | УАРТ3 | КОРИСТУВАЧ | |||
| TX4 RX4 | УАРТ4 | КОРИСТУВАЧ | |||
| TX5 RX5 | УАРТ5 | КОРИСТУВАЧ | |||
| TX2 RX2 | TX2 і RX2 | CRSF | |||
| SBus pad | для приймача SBUS, SBus pad = RX2+інвертор | ||||
| RX2 колодка | ІБУС/ДСМ | ||||
| TX2 колодка | SRXL2 | ||||
| TX2 колодка | FPORT, неперевернутий сигнал ort/ ort (зламаний) | ||||
| TX2 колодка | Телеметрія SmartPort | увімкнути Softserial_Tx1 | |||
| ArduPilot | |||||
| ШІМ 5V толерантний ввід/вивід |
S1 | PWM1 GPIO50 | TIM8_CH4 | DMA/DShot | Група1 |
| S2 | PWM2 GPIO51 | TIM8_CH3 | DMA/DShot | ||
| S3 | PWM3 GPIO52 | ТИМ1_Ч3Н | DMA/DShot | Група2 | |
| S4 | PWM4 GPIO53 | TIM1_CH1 | DMA/DShot | ||
| S5 | PWM5 GPIO54 | TIM2_CH4 | DMA/DShot | Гурп3 | |
| S6 | PWM6 GPIO55 | TIM2_CH3 | DMA/DShot | ||
| S7 | PWM7 GPIO56 | TIM2_CH2 | DMA/DShot | ||
| S8 | PWM8 GPIO57 | TIM2_CH1 | DMA/DShot | ||
| S9 | PWM9 GPIO58 | TIM12_CH1 | БЕЗ DMA | Гурп4 | |
| Світлодіодна накладка | PWM12 GPIO61 | TIM3_CH4 | DMA/DShot | Гурп5 | |
| SERVO12_FUNCTION 120, NTF_LED_TYPES neopixel | |||||
| Змішування Dshot і нормальної роботи ШІМ для виходів обмежено групами, тобто увімкнення Dshot для виходу в групі вимагає, щоб УСІ виходи в цій групі були налаштовані та використані як Dshot, а не як виходи ШІМ. Якщо сервопривод і двигун змішані в одній групі, переконайтеся, що ця група працює з найнижчою частотою ШІМ відповідно до специфікації сервопривод тобто. Серво підтримує Макс. 50Hz, ESC повинен працювати на частоті 50Hz в цій групі. |
|||||
| АЦП | Датчик ВБАТ | 0~30В | Вбудований роздільник 1K:20K | BATT_VOLT_PIN BATT_VOLT_MULT |
14 21.0 |
| Датчик струму | 0~3, 3В | вбудований поточний сенс | BATT_CURR_PIN BATT_AMP_PERVLT |
15 40 |
|
| I2C | I2C1 | 5V толерантний ввід/вивід | Компас | COMPASS_AUTODEC | 1 |
| бортовий Baro SPL06-001 | Адреса | 0x76 | |||
| Цифрова швидкість I2C MS4525 ДЛВР-Л10Д |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
1 1 9 |
|||
| УАРТ 5V толерантний ввід/вивід |
USB | USB | консоль | СЕРІЯ0 | |
| TX3 RX3 | USART3 | БЕЗ DMA | телем2 | СЕРІЙНИЙ2 | |
| TX5 RX5 | УАРТ5 | БЕЗ DMA | GPS1 *** | СЕРІЙНИЙ3 | |
| TX4 RX4 | УАРТ4 | БЕЗ DMA | GPS2 *** | СЕРІЙНИЙ4 | |
| TX2 RX2 СБУС |
USART2 | з ДМА | RC введення/приймач | СЕРІЙНИЙ6 | |
| RX2 | IBUS/DSM/PPM | BRD_ALT_CONFIG 0 За замовчуванням |
|||
| Sbus колодка | СБУС | ||||
| TX2 і RX2 | CRSF | BRD_ALT_CONFIG 1 SERIAL6_PROTOCOL 23 |
SERIAL6_OPTIONS 0 | ||
| TX2 | неперевернутий FPort (зламаний) | SERIAL6_ОПЦІЇ 4 | |||
| TX2 | SRXL2 | SERIAL6_ОПЦІЇ 4 | |||
- *** Якщо підключити лише один GPS до UART4 (TX4/RX4), pls set SERIAL3_PROTOCOL = -1 або non “5”. інакше ArduPilot припинить пошук GPS під час завантаження, якщо його не буде знайдено на першому порту (SERIAL3/UART5), налаштованому для протоколу GPS.
Реєстрація SD-карти
- встановити LOG_BACKEND_TYPE = 1 (Файл)
Телеметрія Frsky Smartport
- неінвертований (зламаний) ортовий сигнал
- будь-який запасний Uart_TX
- SERIALx_BAUD 57
- SERIALx_ОПЦІЇ 7
- SERIALx_PROTOCOL 4 або 10(для yaapu)
Реле (ПІНІО)
- PINIO1, вихід Vbat ON/OFF, ON за замовчуванням
- PINIO2, PIO2 pad вихід Низький/Високий рівень, Низький рівень за замовчуванням
# GPIO
- PA4 PINIO1 ВИХІД GPIO(81) НИЗЬКИЙ
- PB5 PINIO2 ВИХІД GPIO(82) НИЗЬКИЙ
# RCx_OPTION: параметр введення RC
- 28 Relay1 Увімкнення/Вимкнення
- 34 Relay2 Увімкнення/Вимкнення
наприклад.
- RELAY1_FUNCTION 1
- RELAY1_PIN 81
- RC7_OPTION 28//Використовуйте CH7 передавача для керування виходом Vbat ON/OFF
- RELAY2_FUNCTION 1
- RELAY_PIN2 82//PIO2 колодка
- RC8_OPTION 34//Використовуйте CH8 передавача для керування PIO2 Низький/Високий рівень
Налаштована функція буде активована, коли значення pwm допоміжного перемикача стане вищим за 1800. Він буде деактивований, коли значення впаде нижче 1200.
Перевірте значення pwm, надіслане з передавача, коли комутатор високий і низький, використовуючи початкове налаштування планувальника місії >> Обов’язкове обладнання >> Екран калібрування радіозв’язку. Якщо він не піднімається вище 1800 або нижче 1200, найкраще відрегулювати кінцеві точки сервоприводу в передавачі.
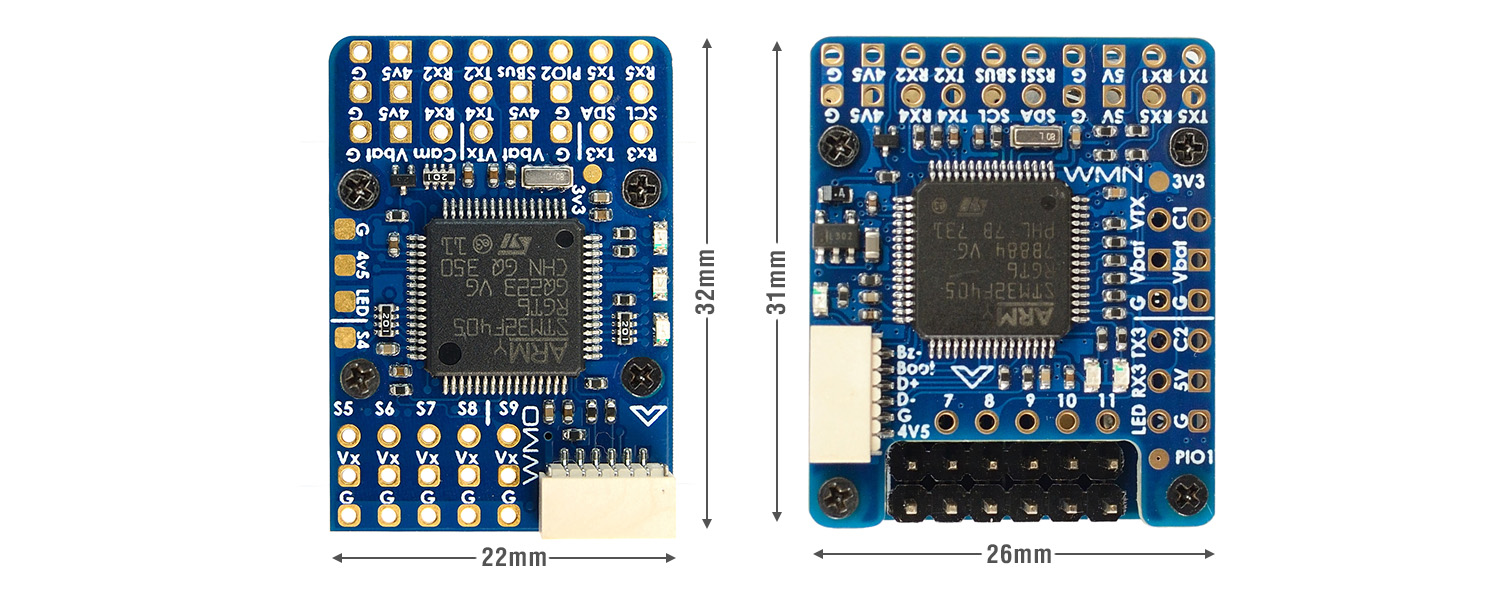
| F405-ВМО | F405-WMN | |
| Розмір | 32* 22мм | 31*26мм |
| Вхідна напруга | 5.4 – 30V | 6 – 30V |
| ШІМ | 10 | 12 |
| УАРТС | 4 | 5 |
| АЦП | 2 | 3 |
| Регулятори | 5V/2A & Vx/7A | 5V/1.5A & Vx/5A |
| Подвійний вхід камери | Ні | Да |
| Vbat відфільтровано | Да | Ні |
| Вбат УВІМКНЕНО/ВИМКНЕНО | Да | Ні |
| Чорна скринька | SD-карта | 16M Спалах |
| ІНАВ | MatekF405TE_SD | МатекФ405ТЕ |
| ArduPilot | МатекФ405-ТЕ | МатекФ405-ТЕ |