
|
Количество
|
Стоимость
|
||
|
|
|||
|
|
|||
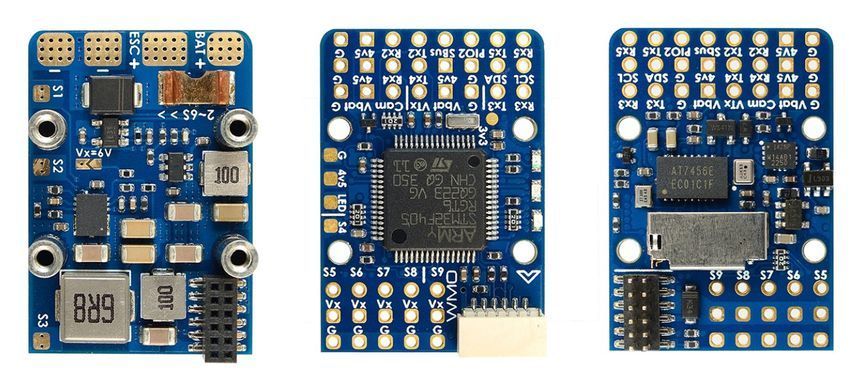
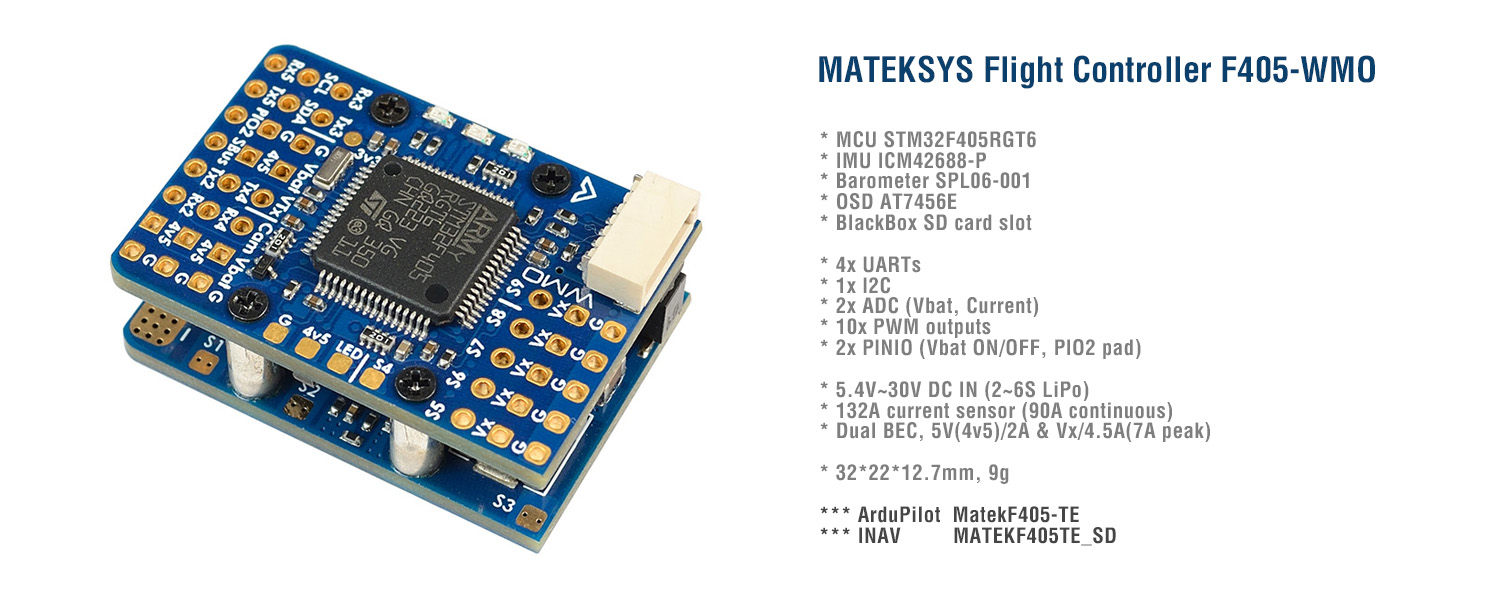
Контроллер полета F405-WMO
STM32F405RGT6, ICM42688P, SPL06, OSD, SD слор, 4xUARTs, 9x ШИМ, 1xI2C, 2xADC
ArduPilot ШИМ 5V толерантный ввод/вывод S1 PWM1 GPIO50 TIM8_CH4 DMA/DShot DMA/DShot S5 PWM5 GPIO54 TIM2_CH4 DMA/DShot Гурп3 S6 PWM6 GPIO55 TIM2_CH3 DMA/DShot S7 PWM7 GPIO56 TIM2_CH2 DMA/DShot S8 PWM8 GPIO57 TIM2_CH1 DMA/DShot S9 DMA Гурп4 Светодиодная накладка PWM12 GPIO61 TIM3_CH4 DMA/DShot Гурп5 SERVO12_FUNCTION 120, NTF_LED_TYPES neopixel Смешивание Dshot и нормальной работы ШИМ для выходов ограничено группами, т.е. включение Dshot для выхода в настроены и использованы как Dshot, а не как выходы ШИМ. Если сервопривод и двигатель смешаны в одной группе, убедитесь, что группа работает с самой низкой частотой ШИМ в соответствии со спецификацией сервопривод т.е. Серво поддерживает Макс. 50Hz, ESC обязан работать на частоте 50Hz в данной группе. АЦП Датчик ВБАТ 0~30В Встроенный разделитель 1K:20K BATT_VOLT_PIN BATT_VOLT_MULT 14 21.0 Датчик тока 0~3, 3В встроенный текущий смысл BATT_CURR_PIN BATT_AMP_PERVLT 15/40 Компас COMPASS_AUTODEC 1 бортовой Baro SPL06-001 0x76 Цифровая скорость I2C MS4525 ДЛВР-Л10Д ARSPD_BUS ARSPD_TYPE ARSPD_TYPE 1 1 9 УАРТ 5V толерантный ввод/вывод USB USB консоль СЕРИ СЕРИЙНЫЙ2 TX5 RX5 УАРТ5 БЕЗ DMA GPS1 *** СЕРИЙНЫЙ3 TX4 RX4 УАРТ4 БЕЗ DMA GPS2 *** СЕРИЙНЫЙ4 TX2 RX2 СБУС USART2 с ДМА RC ввод/приемник СЕРИЙНЫЙ6 RX2 IBUSG колодка СБУС TX2 и RX2 CRSF BRD_ALT_CONFIG 1 SERIAL6_PROTOCOL 23 SERIAL6_OPTIONS 0 TX2 неперевернутый FPort (сломанный) SERIAL6_ОПЦИИ 4 TX2 SRXL2 SERIAL6_ОПЦИИ 4 *** Если подключить SERIAL3_PROTOCOL = -1 или non “5”. иначе ArduPilot прекратит поиск GPS во время загрузки, если он не найден на первом порту (SERIAL3/UART5), настроенном для протокола GPS. Регистрация SD-карты установить LOG_BACKEND_TYPE = 1 (Файл) Телеметрия Frsky Smartport неинвертированный (сломанный) ортовый сигнал любой запасной Uart_TX SERIALx_BAUD 57 SERIALx_ОПЦИИ 7 SERIALx_PROTOCOL 4 или 10(для yaapu) ON/OFF, ON по умолчанию PINIO2, PIO2 pad выход Низкий/Высокий уровень, Низкий по умолчанию # GPIO PA4 PINIO1 ВЫХОД GPIO(81) НИЗКИЙ PB5 PINIO2 ВЫХОД GPIO(82) НИЗКИЙ # RC 2 Включение/выключение 34 Relay2 Включение/выключение, например. RELAY1_FUNCTION 1 RELAY1_PIN 81 RC7_OPTION 28//Используйте CH7 передатчика для управления выходом Vbat ON/OFF RELAY2_FUNCTION 1 RELAY_PIN2 82//PIO2 колодка RC8_OPTION 34//Использовать Низкий/Высокий Настроенная функция будет активирована, когда значение pwm вспомогательного переключателя станет выше 1800. Он будет деактивирован, когда значение упадет ниже 1200. Обязательное оборудование >> Экран калибровки радиосвязи. Если она не поднимается выше 1800 или ниже 1200, лучше всего отрегулировать конечные точки сервопривода в передатчике.
Спецификации FC
- MCU: СТМ32Ф405РГТ6, 168МГц, 1МБ Флэш
- ИМУ: МЦМ42688-П
- Баро: SPL06-001
- OSD: AT7456E
- Blackbox: слот для SD-карт
- 4х УАРТ
- 10x выходы ШИМ
- 1x I2C
- 2x АЦП (VBAT, Ток)
- 1x запасной PINIO
- Контроль ВБТ-выхода ON/OFF
- USB/удлинитель звукового сигнала с типом C (USB2.0)
- Встроенный инвертор UART2-RX для входа SBUS
Сила
- 5.4~30V DC IN (2~6S LiPo)
- 132A Current Sense (шкала INAV 250, ArduPilot 40A/V)
- PDB/Резистор измерения тока: 90A непрерывный, 132A пакет.
- BEC 5V(4v5) 2A для FC & Периферические устройства
- BEC Vx 4.5A conПик 7А) для сервоприводов, опция 5В/6В
- Фильтрованный Vbat для VTX и камеры
- ЛДО 3.3В 200м А
- Датчик напряжения батареи: 1к:20к
Прошивка ФК
- ArduPilot: MatekF405-TE
- ИНАВ: МАТЕКФ405ТЕ_СД
Физический
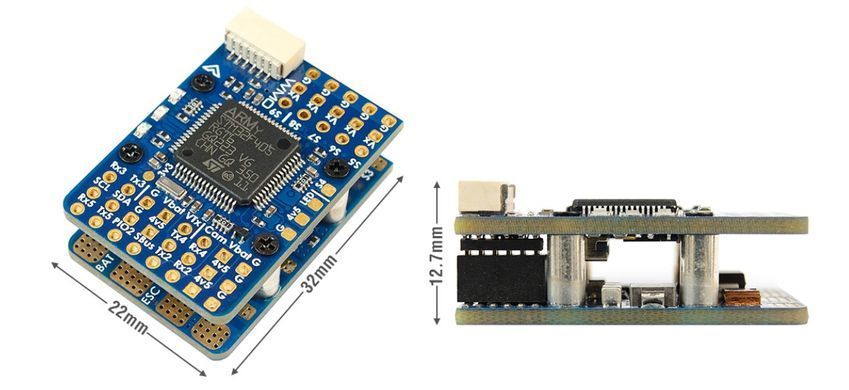
- Размеры: 32 x 22 x 12,7 мм
- Вес: 9g
Включая
- 1x F405-ВМО
- 1x USB (Type-C)/Beep (пассивный зуммер) Удлинитель + 20см JST-SH-6P кабель для USB-удлинителя.
- Дюпон 2.54 шпильки (Доска отправляется распаянной)
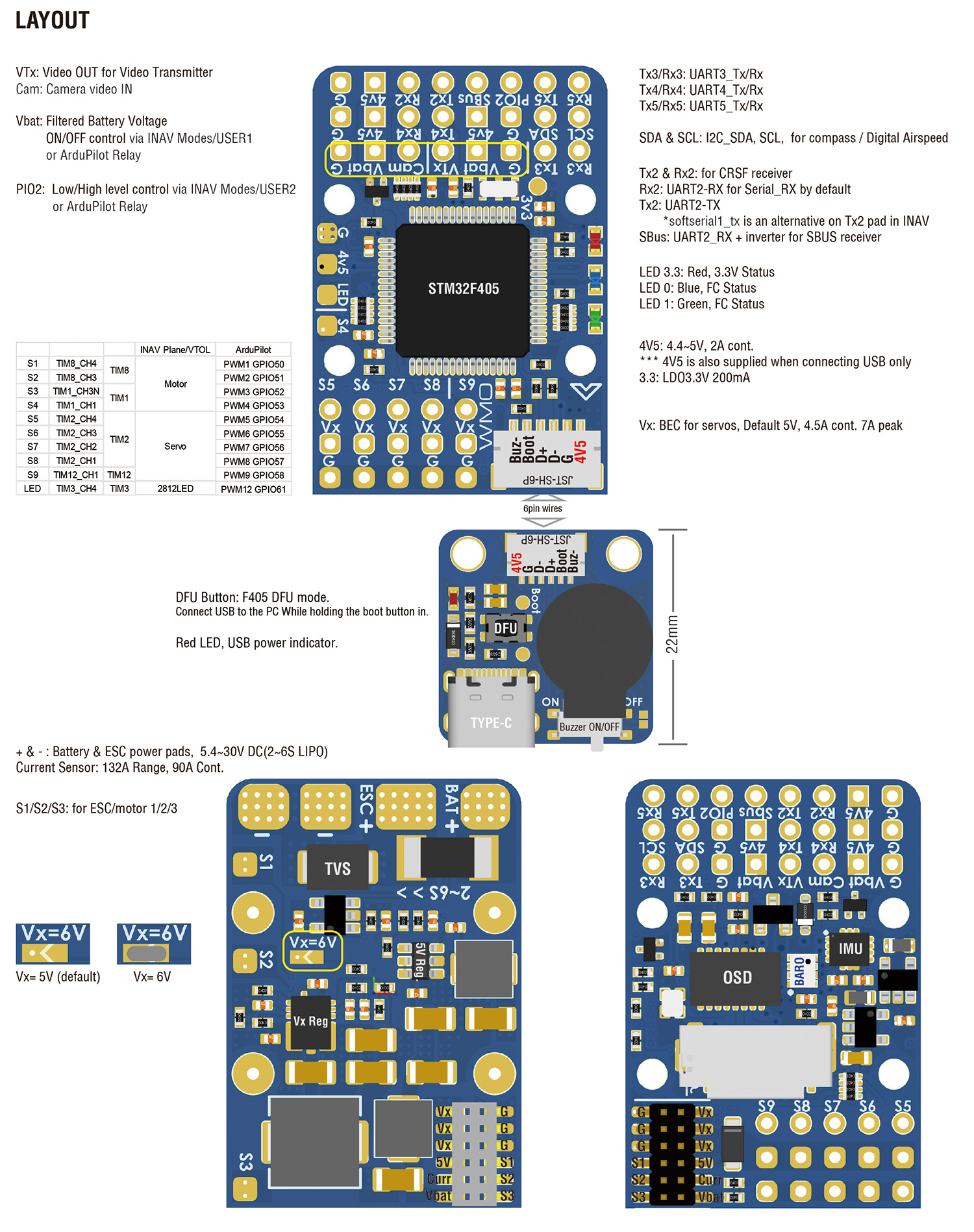
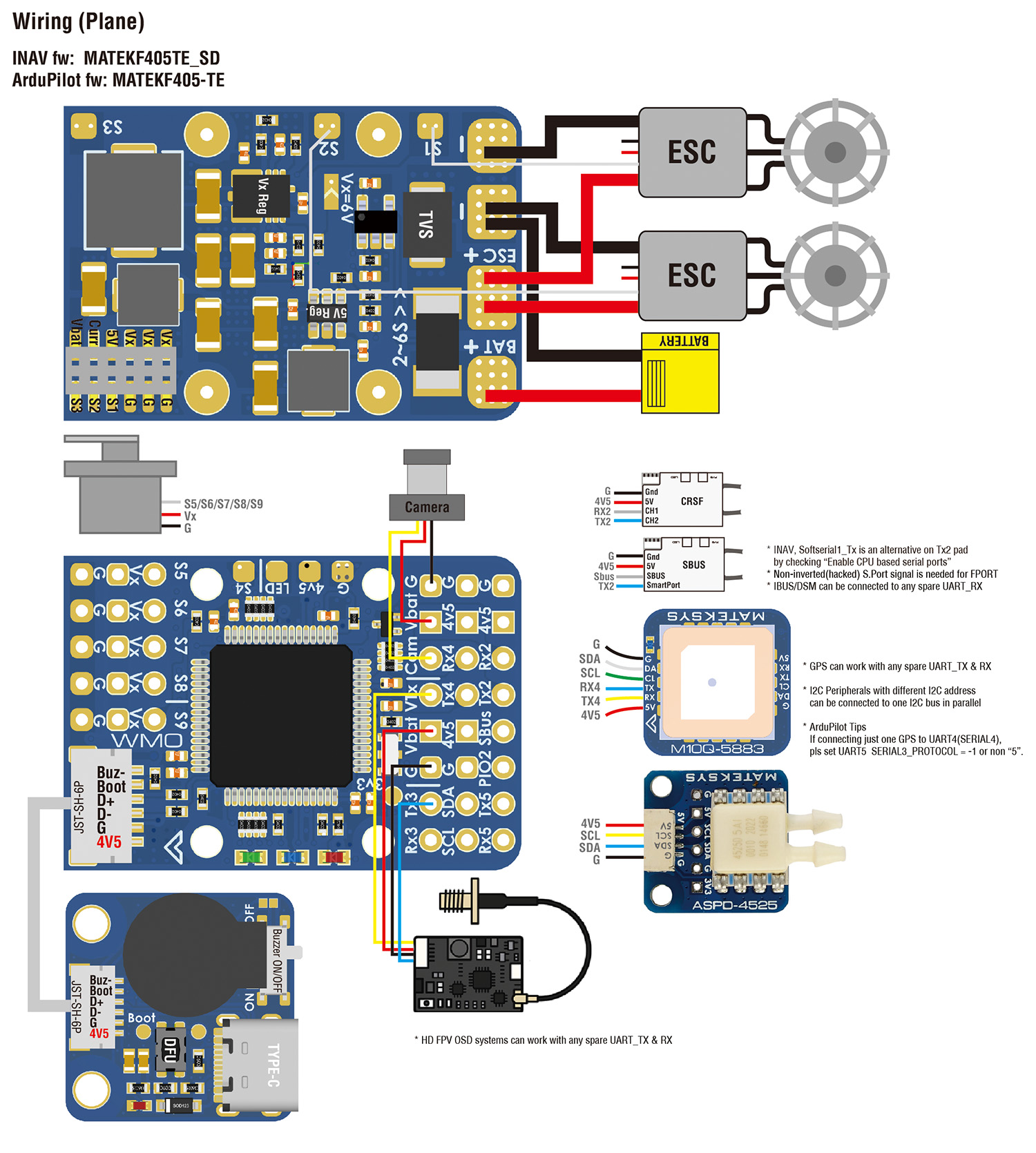
| ИНАВ | ТЕМ | INAV Plane/VTOL | |||
| ШИМ | S1 | 5 В толерантный ввод/вывод | TIM8_CH4 | ТИМ8 | Мотор |
| S2 | 5 В толерантный ввод/вывод | TIM8_CH3 | |||
| S3 | 5 В толерантный ввод/вывод | ТИМ1_Ч3Н | ТИМ1 | ||
| S4 | 5 В толерантный ввод/вывод | TIM1_CH1 | |||
| S5 | 5 В толерантный ввод/вывод | TIM2_CH4 | ТИМ2 | Серво | |
| S6 | 5 В толерантный ввод/вывод | TIM2_CH3 | |||
| S7 | 5 В толерантный ввод/вывод | TIM2_CH2 | |||
| S8 | 5 В толерантный ввод/вывод | TIM2_CH1 | |||
| S9 | 5 В толерантный ввод/вывод | TIM12_CH1 | ТИМ12 | ||
| СВЕТОДИОДНЫЙ | 5 В толерантный ввод/вывод | TIM3_CH4 | ТИМ3 | 2812LED | |
| АЦП | Напряжение VBAT | 5, 4~30В | ADC_CHANNEL_1 | шкала напряжения 2100 | |
| Текущая | 0~3, 3В | ADC_CHANNEL_2 | текущая шкала 250 | ||
| I2C | SCL SDA |
5V толерантный ввод/вывод | Компас | ||
| ОЛЕД | |||||
| бортовый барометр | |||||
| Цифровой датчик скорости воздуха | |||||
| Датчик температуры | |||||
| УАРТ | USB | 5V толерантный ввод/вывод | USB | ||
| TX3 RX3 | УСТР3 | ПОЛЬЗОВАТЕЛЬ | |||
| TX4 RX4 | УАРТ4 | ПОЛЬЗОВАТЕЛЬ | |||
| TX5 RX5 | УАРТ5 | ПОЛЬЗОВАТЕЛЬ | |||
| TX2 RX2 | TX2 и RX2 | CRSF | |||
| SBus pad | для приемника SBUS, SBus pad = RX2+инвертор | ||||
| RX2 колодка | ИБУС/ДСМ | ||||
| TX2 колодка | SRXL2 | ||||
| TX2 колодка | FPORT, неперевернутый сигнал ort/ ort (сломанный) | ||||
| TX2 колодка | Телеметрия SmartPort | включить Softserial_Tx1 | |||
| ArduPilot | |||||
| ШИМ 5V толерантный ввод/вывод |
S1 | PWM1 GPIO50 | TIM8_CH4 | DMA/DShot | Группа1 |
| S2 | PWM2 GPIO51 | TIM8_CH3 | DMA/DShot | ||
| S3 | PWM3 GPIO52 | ТИМ1_Ч3Н | DMA/DShot | Группа2 | |
| S4 | PWM4 GPIO53 | TIM1_CH1 | DMA/DShot | ||
| S5 | PWM5 GPIO54 | TIM2_CH4 | DMA/DShot | Гурп3 | |
| S6 | PWM6 GPIO55 | TIM2_CH3 | DMA/DShot | ||
| S7 | PWM7 GPIO56 | TIM2_CH2 | DMA/DShot | ||
| S8 | PWM8 GPIO57 | TIM2_CH1 | DMA/DShot | ||
| S9 | PWM9 GPIO58 | TIM12_CH1 | БЕЗ DMA | Гурп4 | |
| Светодиодная накладка | PWM12 GPIO61 | TIM3_CH4 | DMA/DShot | Гурп5 | |
| SERVO12_FUNCTION 120, NTF_LED_TYPES neopixel | |||||
| Смешивание Dshot и нормальной работы ШИМ для выходов ограничено группами, т.е. включение Dshot для выхода в группе требует, чтобы ВСЕ выходы в этой группе были настроены и использованы как Dshot, а не как выходы ШИМ. Если сервопривод и двигатель смешаны в одной группе, убедитесь, что группа работает с самой низкой частотой ШИМ в соответствии со спецификацией сервопривод т.е. Серво поддерживает Макс. 50Hz, ESC должен работать на частоте 50Hz в этой группе. | |||||
| АЦП | Датчик ВБАТ | 0~30В | Встроенный разделитель 1K:20K | BATT_VOLT_PIN BATT_VOLT_MULT |
14 21.0 |
| Датчик тока | 0~3, 3В | встроенный текущий смысл | BATT_CURR_PIN BATT_AMP_PERVLT |
15 40 |
|
| I2C | I2C1 | 5V толерантный ввод/вывод | Компас | COMPASS_AUTODEC | 1 |
| бортовой Baro SPL06-001 | Адрес | 0x76 | |||
| Цифровая скорость I2C MS4525 ДЛВР-Л10Д |
ARSPD_BUS ARSPD_TYPE ARSPD_TYPE |
1 1 9 |
|||
| УАРТ 5V толерантный ввод/вывод |
USB | USB | консоль | СЕРИЯ0 | |
| TX3 RX3 | USART3 | БЕЗ DMA | телем2 | СЕРИЙНЫЙ2 | |
| TX5 RX5 | УАРТ5 | БЕЗ DMA | GPS1 *** | СЕРИЙНЫЙ3 | |
| TX4 RX4 | УАРТ4 | БЕЗ DMA | GPS2 *** | СЕРИЙНЫЙ4 | |
| TX2 RX2 СБУС |
USART2 | с ДМА | RC ввод/приемник | СЕРИЙНЫЙ6 | |
| RX2 | IBUS/DSM/PPM | BRD_ALT_CONFIG 0 По умолчанию |
|||
| Sbus колодка | СБУС | ||||
| TX2 и RX2 | CRSF | BRD_ALT_CONFIG 1 SERIAL6_PROTOCOL 23 |
SERIAL6_OPTIONS 0 | ||
| TX2 | неперевернутый FPort (сломанный) | SERIAL6_ОПЦИИ 4 | |||
| TX2 | SRXL2 | SERIAL6_ОПЦИИ 4 | |||
- *** Если подключить только один GPS к UART4 (TX4/RX4), pls set SERIAL3_PROTOCOL = -1 или non “5”. иначе ArduPilot прекратит поиск GPS во время загрузки, если он не найден на первом порту (SERIAL3/UART5), настроенном для протокола GPS.
Регистрация SD-карты
- установить LOG_BACKEND_TYPE = 1 (Файл)
Телеметрия Frsky Smartport
- неинвертированный (сломанный) ортовый сигнал
- любой запасной Uart_TX
- SERIALx_BAUD 57
- SERIALx_ОПЦИИ 7
- SERIALx_PROTOCOL 4 или 10(для yaapu)
Реле (ПИНИО)
- PINIO1, выход Vbat ON/OFF, ON по умолчанию
- PINIO2, PIO2 pad выход Низкий/Высокий уровень, Низкий по умолчанию
# GPIO
- PA4 PINIO1 ВЫХОД GPIO(81) НИЗКИЙ
- PB5 PINIO2 ВЫХОД GPIO(82) НИЗКИЙ
# RCx_OPTION: параметр ввода RC
- 28 Relay1 Включение/выключение
- 34 Relay2 Включение/выключение
например.
- RELAY1_FUNCTION 1
- RELAY1_PIN 81
- RC7_OPTION 28//Используйте CH7 передатчика для управления выходом Vbat ON/OFF
- RELAY2_FUNCTION 1
- RELAY_PIN2 82//PIO2 колодка
- RC8_OPTION 34//Используйте CH8 передатчика для управления PIO2 Низкий/Высокий уровень
Настроенная функция будет активирована, когда значение pwm вспомогательного переключателя станет выше 1800. Он будет деактивирован, когда значение упадет ниже 1200.
Проверьте значение pwm, отправленное из передатчика, когда коммутатор высокий и низкий, используя начальную настройку планировщика миссии >> Обязательное оборудование >> Экран калибровки радиосвязи. Если она не поднимается выше 1800 или ниже 1200, лучше всего отрегулировать конечные точки сервопривода в передатчике.
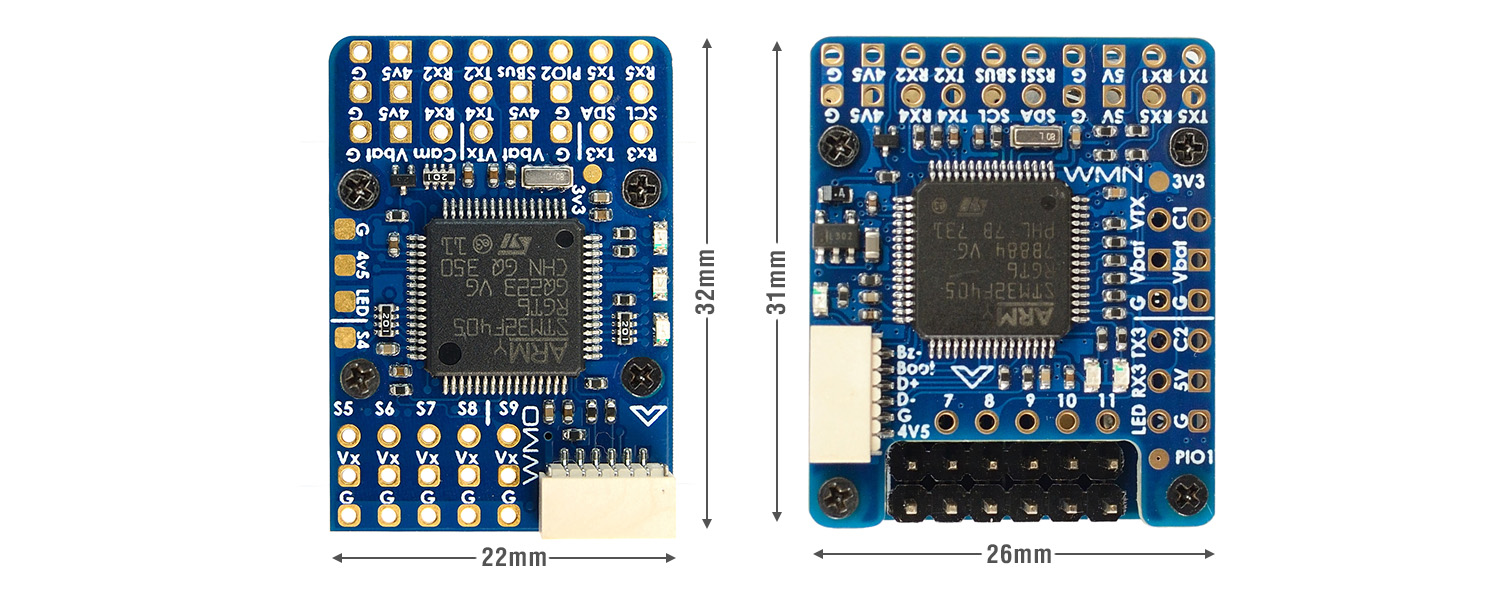
| F405-ВМО | F405-WMN | |
| Размер | 32*22мм | 31*26мм |
| Входное напряжение | 5.4 –; 30V | 6 –ndash; 30V |
| ШИМ | 10 | 12 |
| УАРТС | 4 | 5 |
| АЦП | 2 | 3 |
| Регуляторы | 5V/2A & Vx/7A | 5V/1.5A & Vx/5A |
| Двойной вход камеры | Нет | До |
| Vbat отфильтрован | До | Нет |
| Вбат ВКЛЮЧЕН/ОТКЛЮЧЕН | До | Нет |
| Черный ящик | SD-карта | 16M Вспышка |
| ИНАВ | MatekF405TE_SD | МатекФ405ТЭ |
| ArduPilot | МатекФ405-ТО | МатекФ405-ТО |